|
I am a second year PhD candidate working with Laura Leal-Taixé at the Dynamic Vision and Learning group, TU Munich. Before starting my PhD, I obtained a Master's in Mathematics from TU Munich, while working on Multi-Object Tracking at my current lab. Before that, I got a Bachelor in Mathematics from the University of Barcelona. During my Bsc, I worked with Jordi Vitrià on explainable machine learning. In my free time, I like to climb, play the piano, and cook. Email / CV / Google Scholar / Twitter / Github |

|
|
|
|
I have a general interest in Machine Learning and Computer Vision. Some of the tasks I focus on are detection, segmentation, tracking and human pose estimation. I am also broadly interested in leveraging ideas from classical graph-based approaches and optimization in combination with deep learning to solve vision problems. |
|
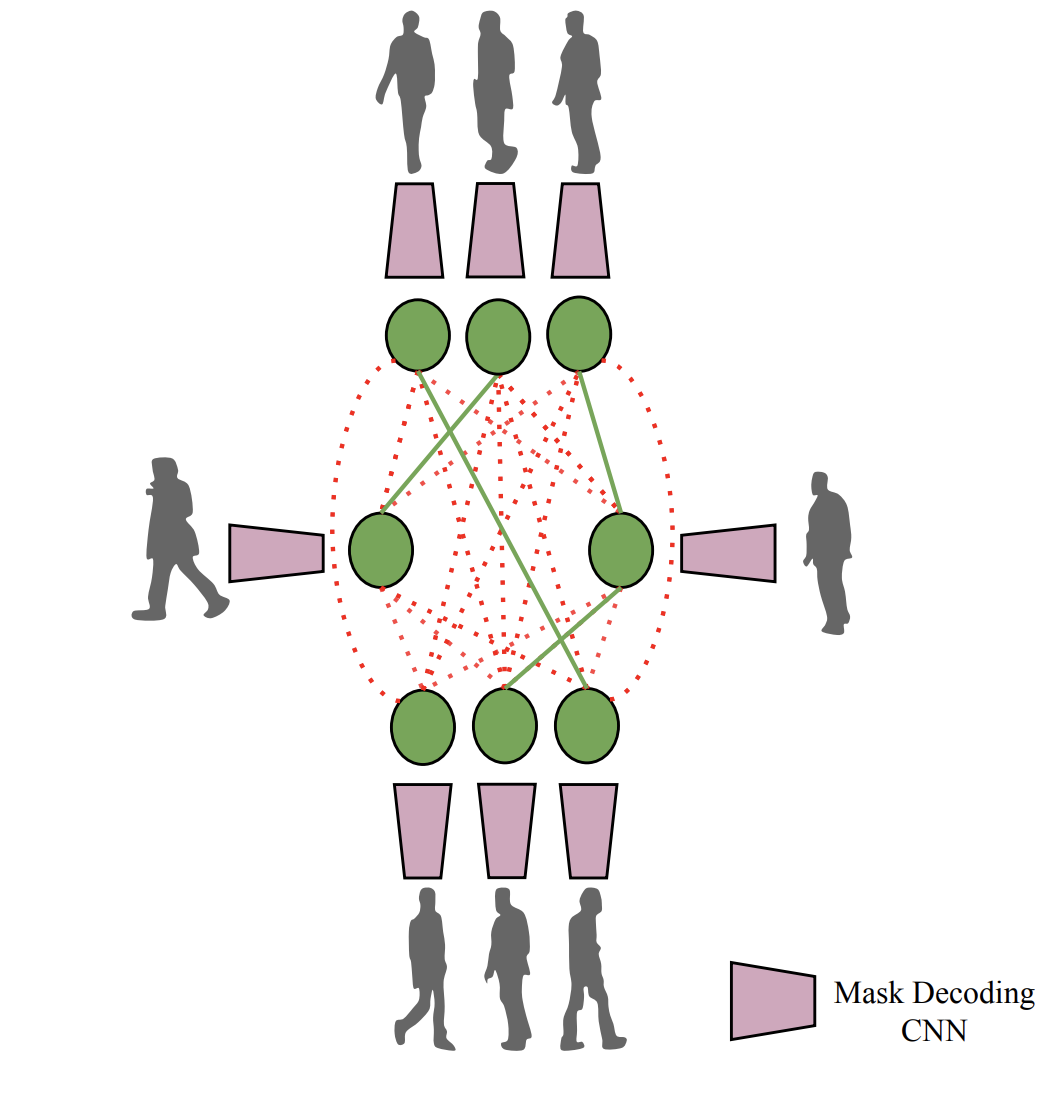
Guillem Brasó*, Orçun Çetintas*, Laura Leal-Taixé IJCV 2022 We build upon our neural solver for multi-object tracking to develop a joint model for tracking and segmentation with neural message passing. Our main contribution is an attention-based message passing framework that operates over segmentation masks and allows us to exploit synergies between data association and segmentation and SOTA results across multiple datasets. paper | code |
|
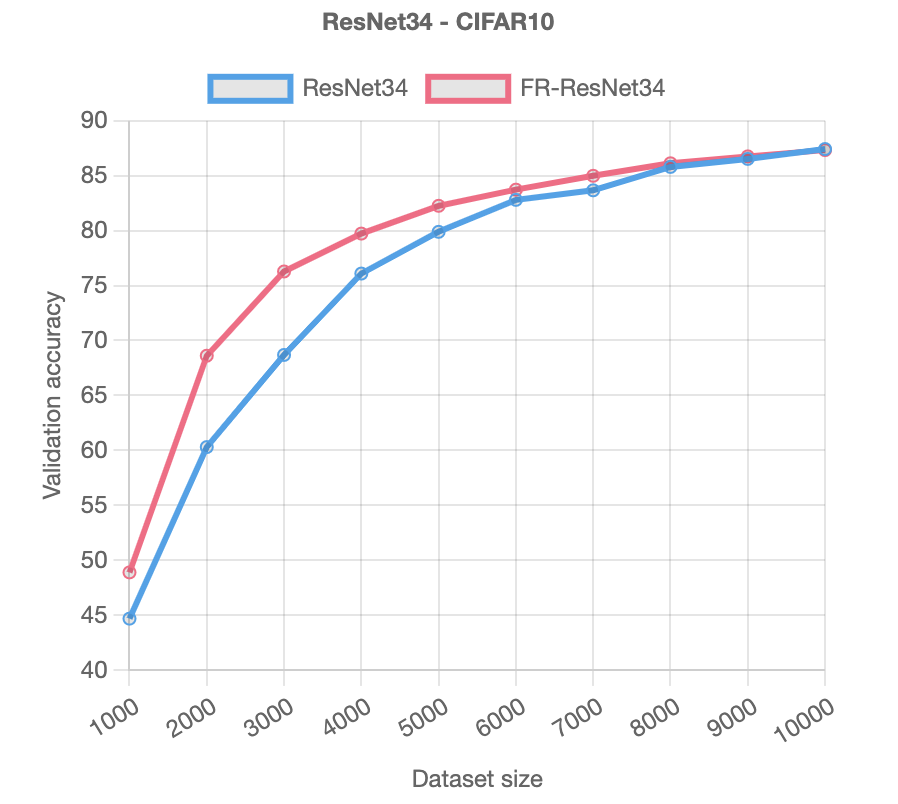
Peter Kocsis, Peter Súkeník, Guillem Brasó, Matthias Niessner, Laura Leal-Taixé, Ismail Elezi NeurIPS 2022 We show that augmenting modern classification architectures with a few fully connected layers during training significantly improves their generalization performance on low-data regimes. We propose a self-distillation mechanism that allows us to keep the number of parameter constant at test-time, while yielding universal improvements across backbones in datasets. paper | website |
|
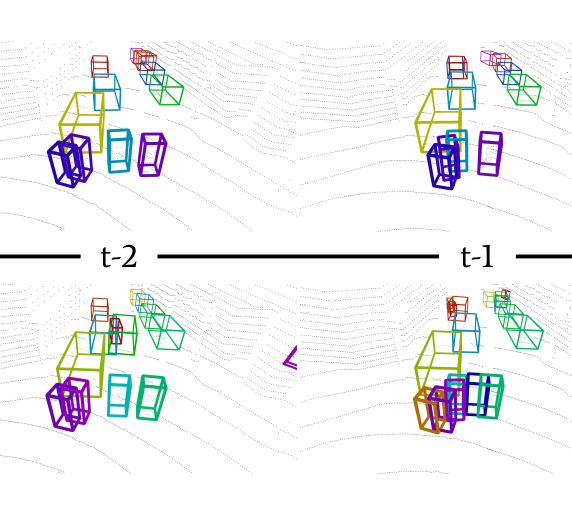
Alexandr Kim, Guillem Brasó, Aljosa Osep, Laura Leal-Taixé ECCV 2022 We propose an appearance-free 3D multi-object tracker that learns to associate 3D bounding boxes over time based on their relative geometric features and spatio-temporal relationships. Our model is light-weight and generalizes remarkably well among different locations and dataset. paper | website | code |
|
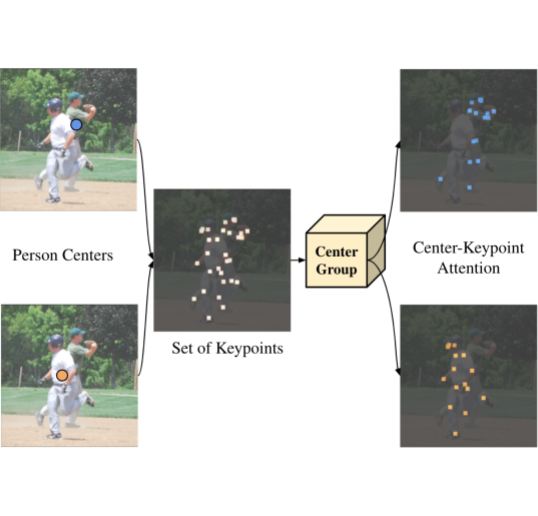
Guillem Brasó, Nikita Kister, Laura Leal-Taixé ICCV 2021 We propose an multi-head attention-based framework for end-to-end bottom-up multi-person pose estimation. Our main idea is to detect both keypoints and object centers, and use cross-attention among them to group keypoints into human poses. paper | video | code |

|
Matteo Fabbri, Guillem Brasó, Gianluca Maugeri, Orcun Cetintas, Riccardo Gasparini, Aljosa Osep, Simone Calderara, Laura Leal-Taixe, Rita Cucchiara ICCV 2021 We introduce MOTSynth, a large-scale synthetic dataset for pedestrian tracking, detection, segmentation and 2D/3D keypoint estimation. We show that trackers and detectors trained on our dataset achieve impressive generalization results when tested on real data. paper | dataset | video | code |
|
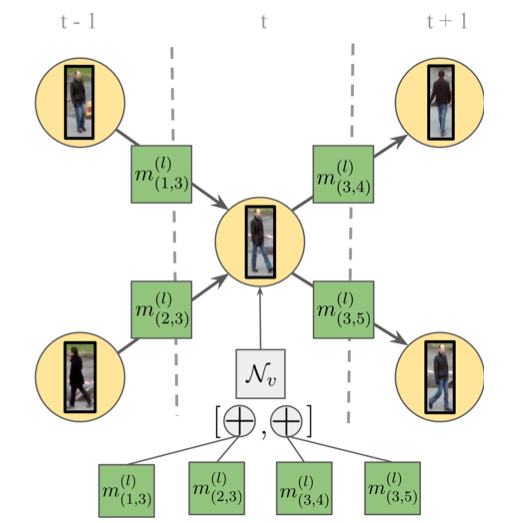
Guillem Brasó, Laura Leal-Taixé CVPR 2020 (Oral Presentation) Inspired by classical graph-based multi-object tracking methods, we propose a neural message passing framework for data association in multi-object tracking. We present the first graph-structured deep learning module for tracking, and achieve SOTA results on the MOTChallenge benchmarks. paper | video | code |
|
This website's source code is from Jon Barron. |